The supervision and control of the UV-robot is an important step in the development and implementation of this new technology. The objective is to ensure an efficient, safe and easy use of the robotized UV-c treatments. The project team has developed a user interface that allows the online supervision of the whole system through several functionalities. Firstly, it allows the user to configure the layout of the greenhouse regarding the crop rows, the corridors and the charging stations. Missions of the robot can be defined in manual and automatic ways. This supervision system is also able to communicate with the robot in near real time and to show its state and the collected data about the greenhouse such as the level of mildew or any other parameter collected by the robot sensors.
The developed user interface contains also an optimization routine able to propose an optimised scheduling of the robot missions in both preventive and corrective modes. The user can use the proposed solution or modify it to satisfy his specific requirements.
To ensure the security of the system regarding data transfer and storage, each grower has its own space for the control and supervision of robot; he can define and store rapidly the parameter of his farm in terms of number greenhouses and their dimensions number of available robots.
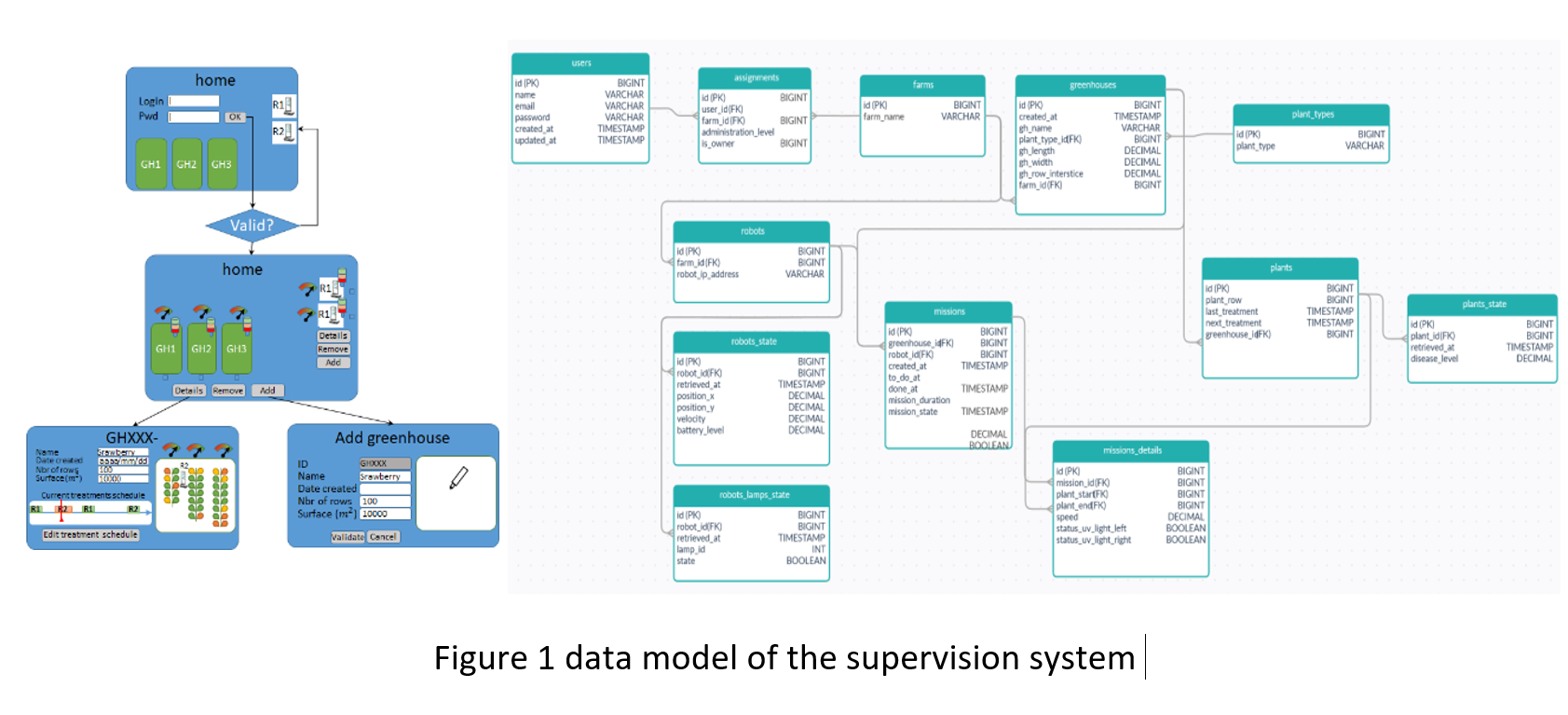
This system is developed by the CESI team through a collaborative and iterative process in order to ensure a user-friendly interface. The main steps are: (I) a functional analysis was defined to ensure a good design of the supervision system, (ii) a data model was defined to identify the links between each component of the system and how data is exchanged between them (Figure 1), and (iii) the development of the web-based graphical user-interface as shown on Figure 2.